Laboratoř se zaměřuje především na vývoj průzkumných létajících prostředků, zejména quadrotorů. Věnuje se mechanické konstrukci, řídicí elektronice a softwaru. Provádí se zde matematické modelování a simulace chování stroje, estimace orientace z palubních snímačů, začlenění do nadřazených systémů (např. teleprezenčního řízení) a letové zkoušky.
Laboratoř se mimo to věnuje také malým kráčejícím robotům a robotům pro robotické soutěže, které jsou využívány zejména pro studentské práce.
Tým: Ing. Vlastimil Kříž, Ing. Petr Gábrlík, Ph.D.
Hlavní činnosti
Laboratoř se zaměřuje především na vývoj průzkumných létajících prostředků, zejména quadrotorů. Věnuje se mechanické konstrukci, řídicí elektronice a softwaru. Provádí se zde matematické modelování a simulace chování stroje, estimace orientace z palubních snímačů, začlenění do nadřazených systémů (např. teleprezenčního řízení) a letové zkoušky.
Laboratoř se mimo to věnuje také malým kráčejícím robotům a robotům pro robotické soutěže, které jsou využívány zejména pro studentské práce.
Tým: Ing. Vlastimil Kříž, Ing. Petr Gábrlík, Ph.D.




Přístrojové a technické vybavení laboratoře
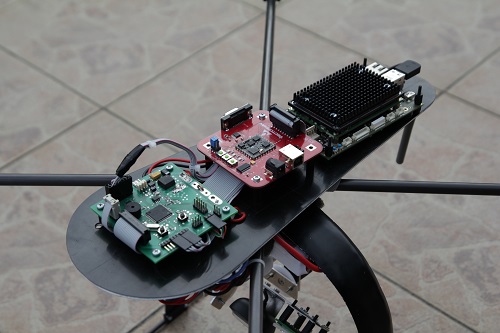
- Létající robot Uranus 1 (hliníková konstrukce)
- Létající robot Uranus 2 (uhlíková konstrukce)
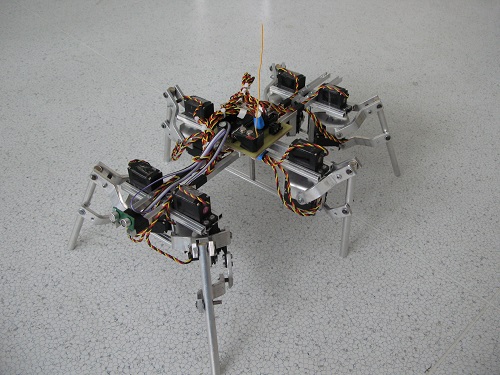
- 6-nohý kráčející robot s nohami se třemi stupni volnosti
- 6-nohý kráčející robot s nohami se dvěma stupni volnosti Černá vdova
- 4-nohý kráčející robot s nohami se třemi stupni volnosti
- Konstrukce pro testování létajících robotů
- AHRS jednotka Vectornav VN-100
- AHRS jednotka Xsens MTi-G
- IMU jednotka ADIS 16405
- Lokalizační systém Polhemus Liberty Latus
- Stavebnice Lego Mindstorm NXT
